How Do You Know If a Robot Is Getting Better?
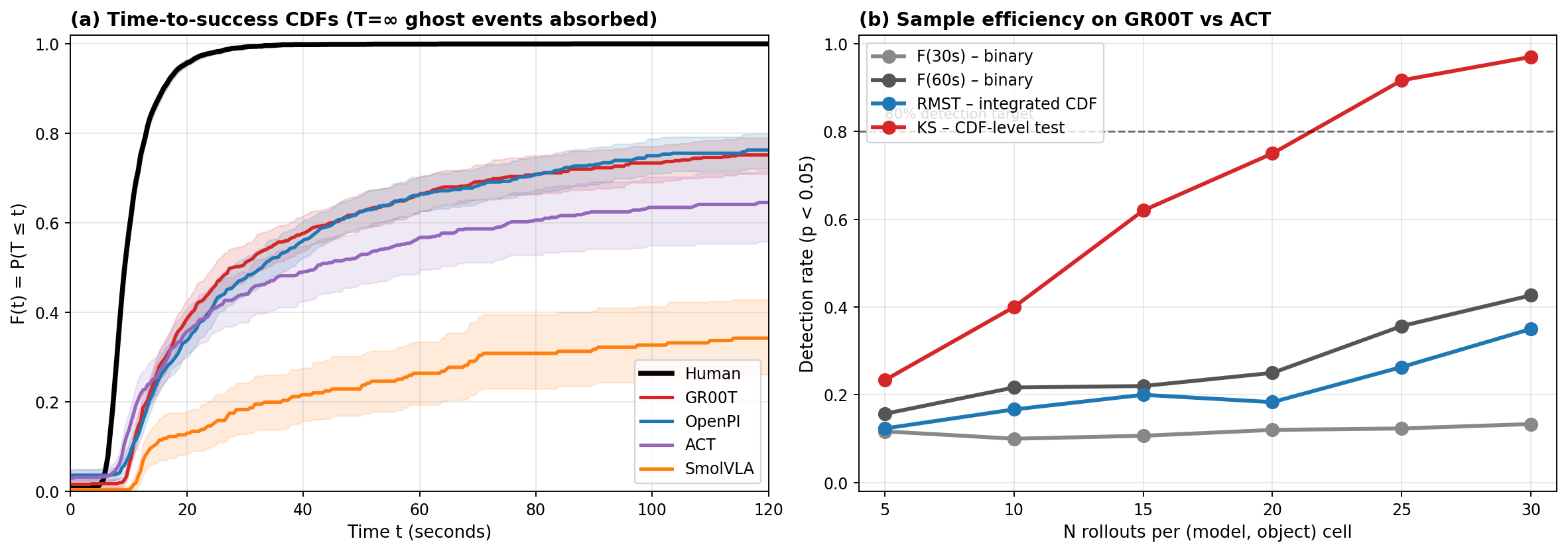
Robotics measures progress with one number, the success rate. Our new PhAIL paper argues for working with distributions instead, and shows why that's the only honest way to tell if robots are improving.
Robotics measures progress with one number, the success rate. Our new PhAIL paper argues for working with distributions instead, and shows why that's the only honest way to tell if robots are improving.
Sergey gave a talk at Nebius Build Berlin titled "The VLA Reality Check" — what PhAIL tells us about the state of robot AI. Here are the slides.
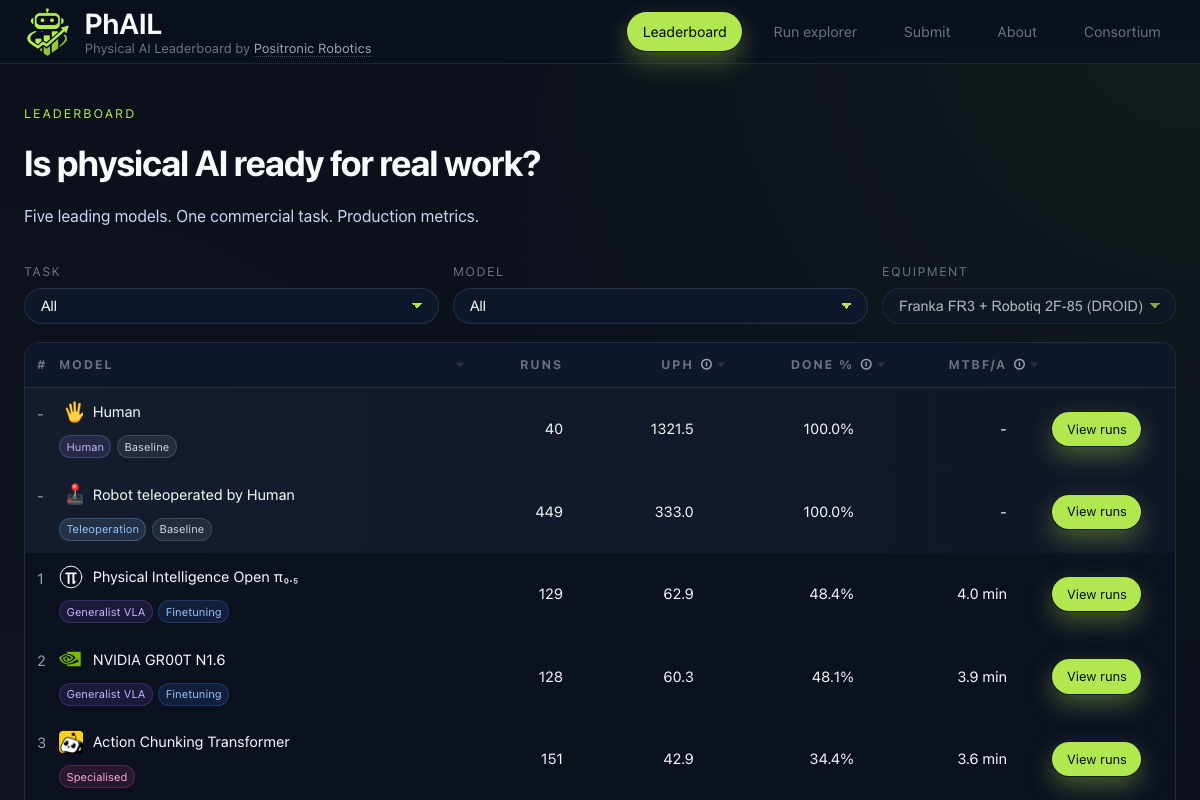
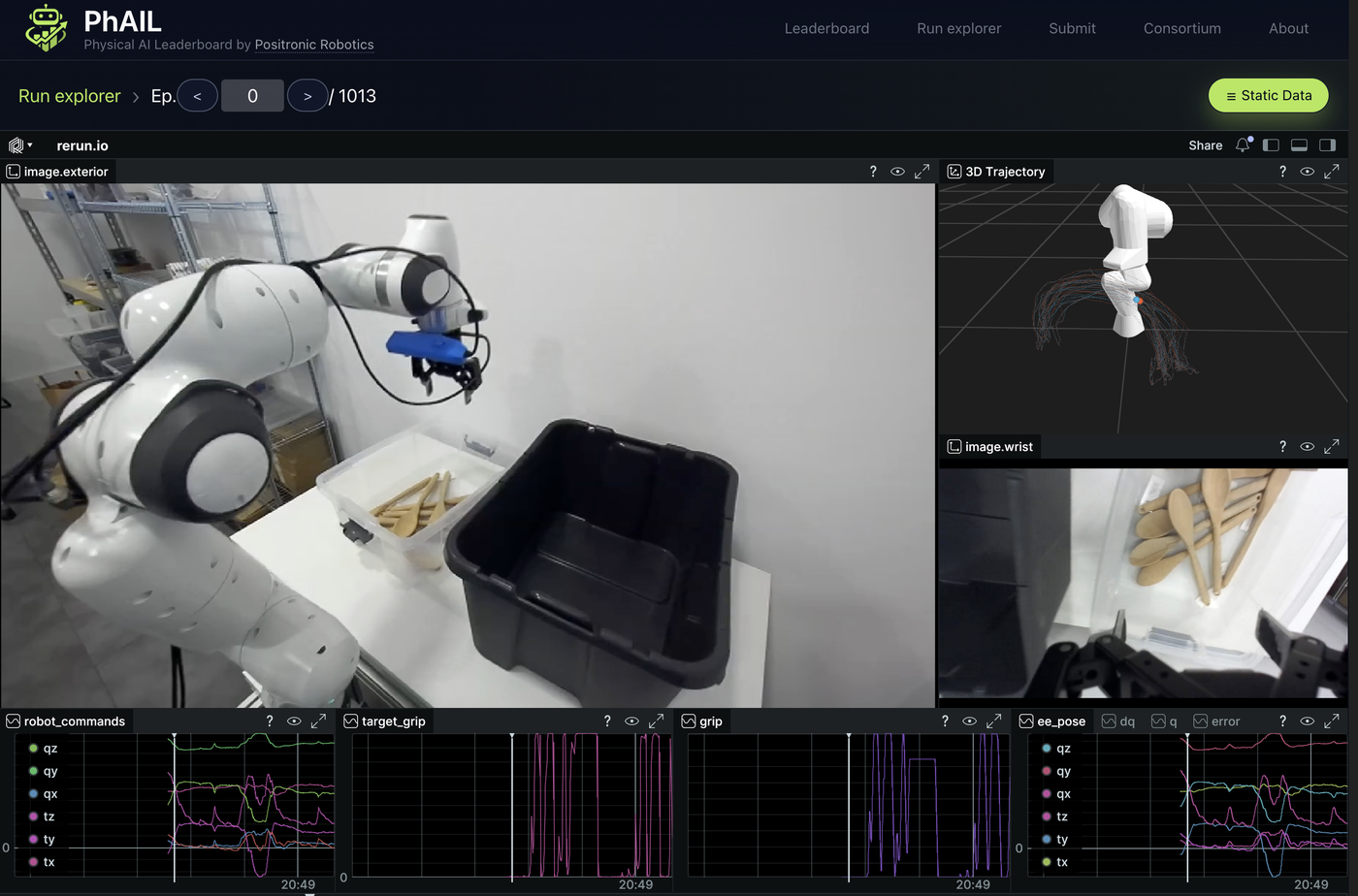
We built PhAIL – the Physical AI Leaderboard – to measure how foundation models actually perform on real commercial robotics tasks. The best model runs at 5% of human throughput.

Positronic Robotics launches PhAIL (Physical AI Leaderboard) – an ongoing, real-world benchmark evaluating robotics foundation models on commercial tasks using throughput and reliability metrics.

We are releasing pos3, a lightweight Python library that makes working with S3 as simple as using local files.

Sergey gave a talk at Neapolis University Pafos on "How to Train Your Robot: A Practical Guide to Physical AI". Here are the slides and summary.
We are publicly announcing Positronic Robotics to fix the broken infrastructure of ML robotics. We're building a Python-native runtime and a data OS to make professional-grade AI robotics approachable.